 Magazin
Magazin AM Business
AM Business Info Guide
Info Guide Directories
Directories Events
Events
Wissenschaftler der Florida Atlantic University (FAU) und des US-amerikanischen Office of Naval Research haben 3D-gedruckte Quallenroboter entwickelt und hergestellt, die empfindliche Korallenriffe überwachen können.
Der Forschungsartikel, der in der neuesten Ausgabe der Zeitschrift Bioinspiration & Biomimetics veröffentlicht wurde, stellt fest: “Viele verschiedene Wassertiere haben Inspiration für neuartige Konstruktionsmerkmale von Robotern geliefert, darunter Oktopus, Schildkröte, Messerfisch, Mantarochen und Quallen.”
“Weiche Roboter haben ein enormes Potenzial, empfindliche marine Ökosysteme wie Korallenriffe zu erforschen und zu überwachen, ohne an fragilen Objekten unbeabsichtigte Schäden zu verursachen.”
Laut Dr. Erik Engeberg, außerordentlicher Professor am Department für Meeres- und Maschinenbau der FAU, war die Erforschung empfindlicher aquatischer Lebensräume für Meeresforscher immer eine Herausforderung. Vor allem Korallenriffe müssen überwacht werden, da sie Lebensraum und Schutz für verschiedene Meeresorganismen bieten.
So hat das Forscherteam, das die hervorragenden Schwimmfähigkeiten der Quallen erkannt hat, fünf einzigartige weiche Roboter entwickelt, die “im Ozean ungebunden sind, sich durch Öffnungen, die schmaler sind als der Nenndurchmesser der Qualle, quetschen und von einer Seite zur anderen lenken können.”
Die Quallenroboter halten einen 3D-gedruckten Körper mit acht weichen hydraulischen Netzwerkaktuatoren aufrecht, die sich von der Mitte aus erstrecken, ähnlich der Form einer Mondqualle. Diese Aktuatoren wurden gewählt, um eine unbeabsichtigte Beschädigung fragiler biologischer Systeme zu minimieren. Die Studie erklärt, “lebende Quallen haben im Wesentlichen neutralen Auftrieb, also wurde Wasser als das Medium gewählt, um die hydraulischen Netzaktuatoren aufzublasen, während sie frei im Ozean, im Pool oder im Aquarium schwimmen.”
Die Forscher entwarfen Modellformen für den Quallenroboter in SolidWorks und 3D druckten anschließend mit einem Ultimaker 2 mittels PLA. Jeder Tentakel hatte einen gemeinsamen Kanal, der sich von der Mitte des Roboters radial nach außen erstreckte. Vier dieser Kanäle wurden auf jeder Seite der Qualle verbunden, so dass vier Tentakel von einer einzigen Impellerpumpe angetrieben werden konnte”, heißt es in der Studie. Außerdem wurden zwei Pumpen verwendet, um die acht Tentakeln zu betätigen.
Die Tentakelaktuatoren und segmentierten Klappenformen, die den Körper des Quallenroboters bildeten, wurden dann mit Silikongummi gefüllt. Ein zylindrisches Gehäuse für den Quallen-Mikrocontroller und die Elektronik wurde ebenfalls mit ABS mittels eines Axiom AirWolf 3D-Druckers gedruckt.
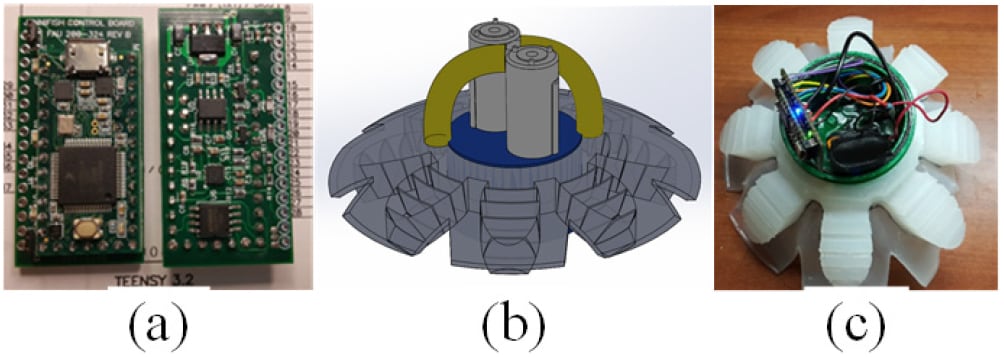
(a) Platine zur Kontrolle der weichen Roboterqualle. (b) Montage der Pumpen auf der Unterseite des Zentralbehälters des Quallenroboters. Flexible Gummirohre wurden zwischen den Pumpenauslässen und dem Einlass zu beiden Gruppen von vier hydraulischen Tentakel-Aktuatoren verbunden. (c) Integration von Elektronik in das zentrale Gehäuse.
Dr. Engeberg fügte hinzu: “Wir fanden heraus, dass die Roboter durch Öffnungen schwimmen konnten, die schmaler als der Nenndurchmesser des Roboters waren. In Zukunft planen wir, Umgebungssensoren wie Sonar zusammen mit einem Navigationsalgorithmus in den Regelalgorithmus des Roboters zu integrieren. Dadurch kann er Lücken finden und feststellen, ob er durch sie hindurchschwimmen kann.”
Fünf einzigartige Roboterquallen wurden mit hydraulischen Netzwerkaktoren konstruiert. Die Ergebnisse zeigten, dass die Materialzusammensetzung der Aktoren die von der Qualle erzeugte Kraft signifikant beeinflusste, ebenso wie die Betätigungsfrequenz und die Hubamplitude. Die größten Kräfte wurden mit einer Halbhubamplitude bei 0,8 Hz und einem Tentakel-Betätiger-Klappen-Material mit einer Shorehärtezusammensetzung von 30-30 gemessen. Die Roboterqualle demonstrierte die Fähigkeit, durch zeitweilige Versetzung der Tentakel-Betätigungshübe auf gegenüberliegenden Seiten des Roboters richtungsmäßig zu schwimmen.
Der Forschungsartikel “Thrust force characterization of free-swimming soft robotic jellyfish” wurde gemeinsam von Jennifer Frame, Nick Lopez, Oscar Curet und Erik D Engeberg verfasst.















