 Magazin
Magazin AM Business
AM Business Info Guide
Info Guide Directories
Directories Events
Events
Nächste Woche startet in Vancouver die SIGGRAPH 2018, die weltgrößte Konferenz für Computergrafik und interaktive Techniken, fünf Tage lang mit interessanten Programmen und Ausstellungen. Viele Forschungsteams aus der ganzen Welt präsentieren hier die Ergebnisse ihrer neuesten Projekte, die von 3D-Formen und Augmented Reality bis hin zu Topologieoptimierung und 3D-Scanning reichen und in diesem Jahr tut dies auch die Technische Universität Delft (TU Delft).
Ein Forschungsteam unter der Leitung von Dr. Charlie C. L. Wang, Professor und Inhaber des Lehrstuhls für Advanced Manufacturing im Fachbereich für Konstruktionstechnik der TU Delft, hat seine neuesten Forschungsergebnisse in einem Vortrag mit dem Titel “Support-Free Volume Printing by Multi-Axis Motion” für die Konferenz veröffentlicht. Das Paper wird auch in der Zeitschrift ACM Transactions on Graphics veröffentlicht.
Die Veröffentlichung
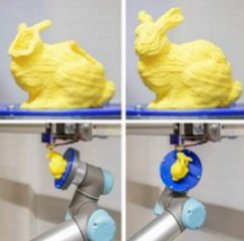
Das Paper, an dem die Forscher der TU Delft mit Forschern der Tsinghua-Universität in China und des französischen Instituts für Forschung in Informatik und Automatisierung (INRIA) zusammengearbeitet haben, erklärt, wie das Team eine neue robotische 3D-Drucktechnik entwickelt hat. Diese ist in der Lage ist, automatisch Werkzeugwege für die Herstellung eines soliden 3D-Modells ohne Verwendung von Stützstrukturen zu erstellen.


Diese Veröffentlichung stellt eine neue Methode zur Herstellung von 3D-Modellen auf einem mehrachsigen Drucksystem vor. Materialien werden im Volumen entlang gekrümmter Werkzeugwege angesammelt, so dass der Bedarf an Stützkonstruktionen bei allen Modellen enorm reduziert, wenn nicht sogar ganz aufgegeben werden kann. Die Strategie zur Bewältigung der Herausforderung der Werkzeugwegplanung für den mehrachsigen 3D-Druck besteht darin, zwei aufeinander folgende Zerlegungen durchzuführen, zuerst Volumen-zu-Oberflächen und dann Oberflächen-zu-Kurven. Die Volumen-zu-Oberflächen-Zerlegung wird durch die Optimierung eines skalaren Feldes innerhalb des Volumens, das die Fertigungssequenz darstellt, erreicht. Das Feld ist so begrenzt, dass seine Isowerte gekrümmte Schichten darstellen, die von unten gestützt werden und eine konvexe Oberfläche aufweisen, die eine kollisionsfreie Navigation des Druckkopfes ermöglicht. Nach dem Extrahieren aller gekrümmten Schichten werden diese durch die Zersetzung der Oberflächen in Kurven mit Werkzeugbahnen, unter Berücksichtigung der Randbedingungen, aus dem Roboterdrucksystem abgedeckt. Diese Methode erzeugt erfolgreich Werkzeugwege für 3D-Druckmodelle mit großen Überhängen und hochgenauer Topologie.
Das Geheimnis hinter dem Erfolg
Professor Wang erklärte, dass das Forschungsteam den weltweit ersten Algorithmus entwickelt hat, der in der Lage ist, ein Robotersystem zu überwachen, das ein allgemeines Volumenmodell mit Hilfe von gekrümmten 3D-Werkzeugwegen herstellt.
Die meisten kommerziellen 3D-Drucksysteme nutzen die 2,5D-Fertigung, bei der sich die Materialien Schicht für Schicht in Ebenen entlang einer festen Richtung ansammeln, was die Entwicklungskosten und die Komplexität senkt, aber den Einsatz von Stützstrukturen erforderlich macht.
Niemand will sich wirklich mit Stützstrukturen auseinandersetzen – es ist schmerzhaft, sie zu entfernen, sobald Ihr 3D-Druckobjekt vom Druckbett verschwunden ist. Aber Roboter-3D-Drucksysteme haben zusätzliche Freiheitsgrade in der Bewegung und können die Richtung ändern, in der sich das Material beim Drucken ansammelt.
In der Veröffentlichung schreiben die Forscher: “In diesem Paper stellen wir eine neue Methode vor, um die Herausforderung der mehrachsigen AM-Werkzeugweggenerierung anzugehen. Unsere Technik basiert auf der Beobachtung, dass die Dimensionalität des Problems sukzessive reduziert werden kann, indem zuerst das Volumen in Sequenzen von gekrümmten Oberflächenschichten zerlegt und dann jede Oberfläche in gekrümmte Werkzeugwege zerlegt wird. Unser Algorithmus sucht nach einer Akkumulationssequenz, die kollisionsfrei ist, eine stets unterstützte Materialabscheidung gewährleistet und alle Regionen so weit wie möglich drucken kann. Gekrümmte Deckschichten werden mit Werkzeugwegen unter Berücksichtigung von Hardware-Beschränkungen abgedeckt.”
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
















