 Magazin
Magazin AM Business
AM Business Info Guide
Info Guide Directories
Directories Events
Events
Forscher der Harvard University haben einen Schwarm von Roboterfischen in 3D gedruckt, die in der Lage sind, ohne Hilfe von Wi-Fi oder GPS in komplexen Mustern zu schwimmen.
Diese “Bluebots” sind von in Riffen lebenden Doktorfischen inspiriert und verfügen über vier Flossen für eine präzise Navigation sowie ein System aus LEDs und Kameras, das es ihnen ermöglicht, in Schwärmen zu schwimmen, ohne zu kollidieren. Die Selbstständigkeit der winzigen Bots könnte sie ideal für ökologische Überwachungsanwendungen machen.
In der Tierwelt findet man selbstorganisierende Kollektive, die sich gemeinschaftlich zusammenarbeiten und bewegen. Seien es Ameisenkolonien, Vogelschwärme oder auch Fischschwärme. In letzter Zeit haben eine Reihe von Forschern versucht, diese natürliche Schwarmintelligenz nachzuahmen. Diese Schwarm-Bots sind aber meist ferngesteuert oder GPS-geführt und nicht selbstorganisiert.
Unter Wasser hat sich bisher die herkömmliche Funk- oder GPS-Kommunikation als ineffektiv erwiesen, so dass die Entwicklung eines Synchronisationsansatzes notwendig wurde. Inspiriert von echten Fischschwärmen, die sich nur durch implizite visuelle Hinweise leiten lassen, machten sich die Harvard-Wissenschaftler daher an die Entwicklung eines neuen Navigationssystems, das keinerlei externe Steuerung benötigt.
Die Erfindung der Bluebots
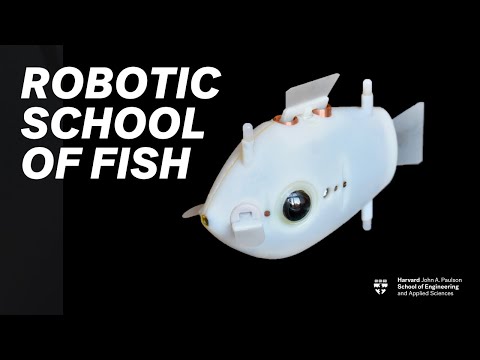
Das Harvard-Team entwickelte sieben autonomen, von Fischen inspirierten Miniatur-Softrobotern, die sie “Bluebots” nannten. Die winzigen Bots verfügen über eine Reihe von Sensoren und Aktuatoren, die es ihnen ermöglichen, alle drei Raumdimensionen wahrzunehmen und sich darin zu bewegen.
Um die Bluebots mit 3D-Sicht auszustatten, statteten die Wissenschaftler sie außerdem mit zwei 195°-Weitwinkelobjektiven und einem Paar vertikal gestapelter Blaulicht-LEDs aus. Im Wesentlichen fungieren die Kameras als “Augen” der Roboter. Mithilfe von Algorithmen, die auf dem Sehvermögen basieren, sind sie in der Lage, die Position ihrer Nachbarn schnell zu erkennen und ihren Kurs zu ändern.
Während der Tests wurden die Bluebots so programmiert, dass sie periodisch in einem bestimmten Zeitintervall blinken. Dies ermöglichte es ihnen, sich zu einem Schwarm zusammenzuschließen, in einer Bewegung, die von außen betrachtet spontan zu sein schien. In späteren Experimenten wurden die Bots dann in unterschiedlichen Intervallen aufgestellt, so dass sie wiederholt von verstreuten in aggregierte Zustände wechseln konnten.
Als letzten Test nutzten die Wissenschaftler implizite Koordinationsalgorithmen, um eine Formation zu erreichen, die dem “Fräsen” ähnelte, einer wirbelartigen Bewegung, die von echten Fischen verwendet wird, um Fressfeinden auszuweichen. Die Bluebots waren schließlich in der Lage, eine minimierte Version des Phänomens zu erreichen und schwammen in dynamischen Kreisen im oder gegen den Uhrzeigersinn.
Die Wissenschaftler glauben, dass Fortschritte in der Kamera- und Antriebstechnik die Entwicklung neuer, komplexerer Unterwasserroboter ermöglichen werden. Vorerst könnte die Koordinationstechnik des Teams jedoch zur Steuerung unbemannter Fahrzeuge in Bereichen wie kollektiven Such- und Rettungsmissionen eingesetzt werden.
Die Ergebnisse der Forscher sind in ihrem Paper mit dem Titel “Implicit coordination for 3D underwater collective behaviors in a fish-inspired robot swarm” detailliert beschrieben. Die Forschung wurde von Florian Berlinger, Melvin Gauci und Radhika Nagpal mitverfasst.















