 Magazin
Magazin AM Business
AM Business Info Guide
Info Guide Directories
Directories Events
Events
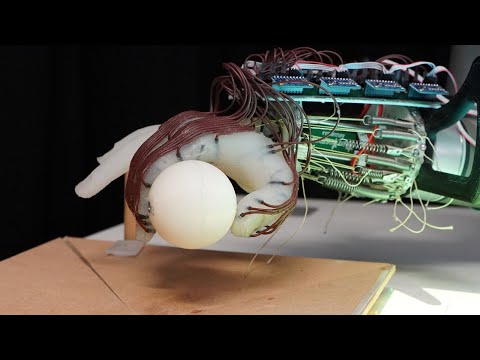
Forscher*innen haben eine kostengünstige, energieeffiziente Roboterhand entwickelt, die allein durch die Bewegung des Handgelenks und das Gefühl in der “Haut” eine Reihe von Gegenständen greifen kann – und sie nicht fallen lässt.
Forschende der Universität Cambridge haben eine energieeffiziente und kostengünstige Roboterhand entwickelt, die verschiedene Gegenstände allein durch Handgelenksbewegungen und das Gefühl in ihrer “Haut” greifen und halten kann. Die 3D-gedruckte Hand kann ihre Finger nicht unabhängig bewegen, führt aber dennoch komplexe Bewegungen aus. Die Ergebnisse werden in der Zeitschrift Advanced Intelligent Systems veröffentlicht.
Die Hand wurde darauf trainiert, verschiedene Objekte zu greifen und konnte anhand von Sensoren auf ihrer “Haut” vorhersagen, ob sie diese fallen lassen würde. Dadurch ist der Roboter leichter zu steuern und energieeffizienter als solche mit voll motorisierten Fingern. Das anpassungsfähige Design könnte zur Entwicklung kostengünstiger Roboter mit natürlicheren Bewegungen beitragen, die lernen können, eine breite Palette von Objekten zu greifen.
Im Bio-Inspired Robotics Laboratory unter Leitung von Prof. Fumiya Iida entwickelten Forschende eine Roboterhand, die viele Objekte mit dem richtigen Druck und minimalem Energieaufwand greifen kann.
“In früheren Experimenten hat unser Labor gezeigt, dass eine Roboterhand allein durch die Bewegung des Handgelenks einen beträchtlichen Bewegungsumfang erreichen kann”, sagt Mitautor Dr. Thomas George-Thuruthel, der jetzt am University College London (UCL) East tätig ist. “Wir wollten herausfinden, ob eine auf passiven Bewegungen basierende Roboterhand nicht nur Objekte greifen kann, sondern auch in der Lage ist, vorherzusagen, ob sie die Objekte fallen lassen wird oder nicht, und sich entsprechend anzupassen.
Die 3D-gedruckte anthropomorphe Hand war mit taktilen Sensoren ausgestattet und nur zu passiven, handgelenkbasierten Bewegungen fähig. Nach mehr als 1200 Tests konnte die Hand 11 von 14 Objekten erfolgreich greifen.
“Die Sensoren, die so etwas wie die Haut des Roboters sind, messen den Druck, der auf das Objekt ausgeübt wird”, so George-Thuruthel. “Wir können nicht genau sagen, welche Informationen der Roboter erhält, aber er kann theoretisch abschätzen, wo das Objekt gegriffen wurde und mit wie viel Kraft.”
“Der Roboter lernt, dass eine Kombination aus einer bestimmten Bewegung und einem bestimmten Satz von Sensordaten zum Scheitern führt, was ihn zu einer anpassungsfähigen Lösung macht”, so der Erstautor, Dr. Kieran Gilday, der jetzt an der EPFL in Lausanne (Schweiz) tätig ist. “Die Hand ist sehr einfach, aber sie kann viele Objekte mit derselben Strategie aufnehmen.”
“Der große Vorteil dieses Designs ist der Bewegungsumfang, den wir ohne Aktoren erreichen können”, so Iida. “Wir wollen die Hand so weit wie möglich vereinfachen. Wir können viele gute Informationen und ein hohes Maß an Kontrolle ohne Aktuatoren erhalten, so dass wir, wenn wir sie hinzufügen, ein komplexeres Verhalten in einem effizienteren Paket erhalten.”
Eine voll bewegte Roboterhand ist nicht nur energieaufwändig, sondern auch ein komplexes Steuerungsproblem. Das passive Design der Hand vereinfacht den Lernprozess und ist einfacher zu steuern. Zukünftig könnte das System erweitert werden, etwa durch Hinzufügen von Computer-Vision-Fähigkeiten oder das Erlernen der Nutzung der Umgebung, um eine größere Vielfalt von Objekten zu greifen.
Mehr über die University of Cambridge finden Sie hier.
















